CQ的智能汽车科普
理想的自研芯片马赫M100发布大概一个月了,最近认真看了他们的科普公众号,翻了翻行业文章,说几个觉得真的有意思的点。
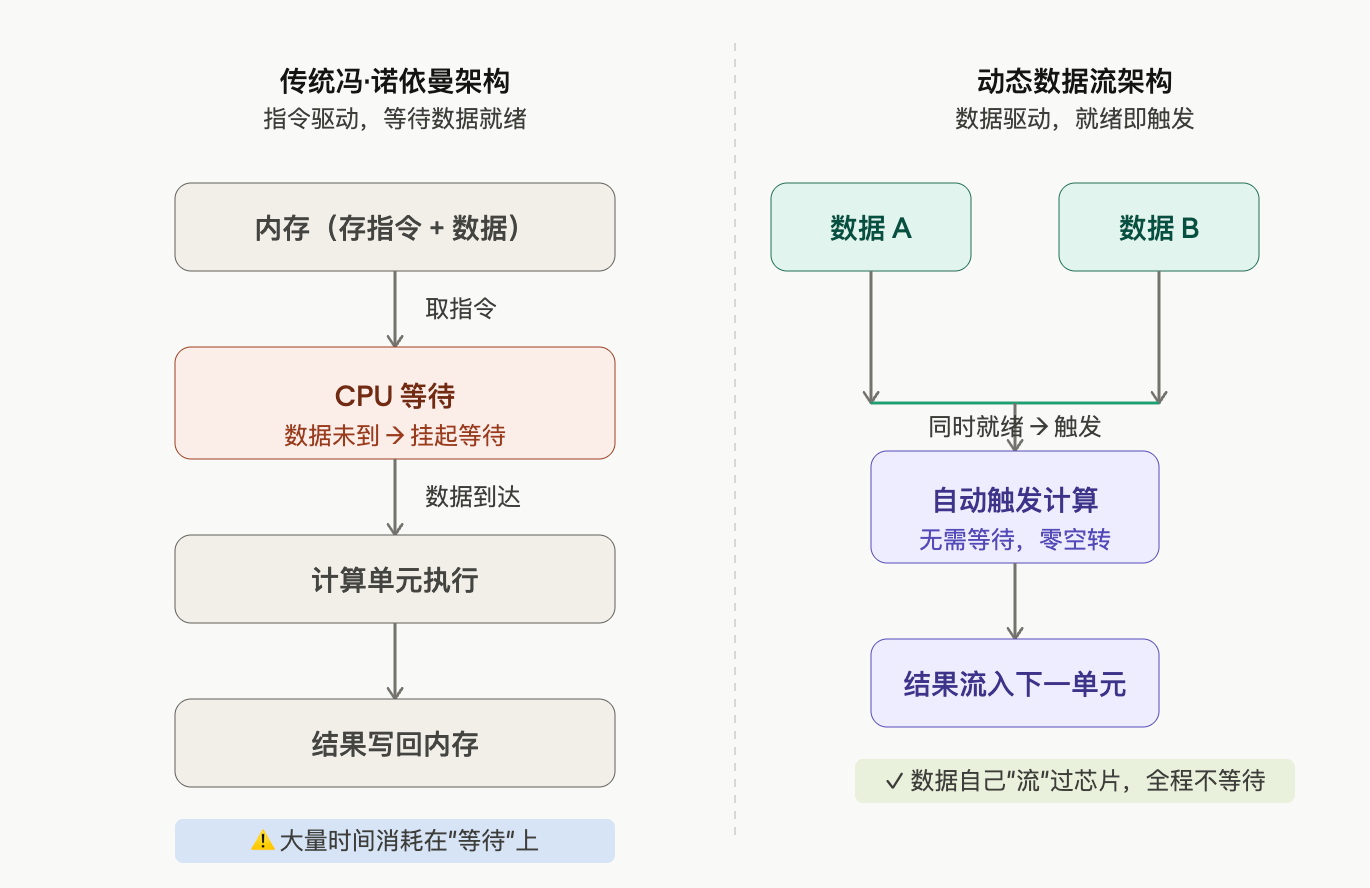
先说一个底层逻辑的问题。现在几乎所有芯片,包括英伟达的GPU,都基于冯·诺依曼架构。本质是"等数据、算数据、存数据",中间有大量空转时间。为了掩盖这个缺陷,芯片越做越复杂,越来越烫,越来越贵。
放在数据中心没问题,放进车里就麻烦了。车规芯片有个死亡三角:算得快、功耗低、延迟稳——三个同时满足很难。传统架构最大的问题不是算力不足,是延迟会抖动。自动驾驶对这个最敏感,300毫秒内必须完成感知决策,忽快忽慢是安全隐患。
M100的选择是换架构。数据流架构,核心逻辑变成"数据到了自动触发计算",不等调度,结果直接流向下一级,全程没有等待。同时基本去掉了多级缓存,改成按计划搬数据,不靠猜。
跑出来的数字:单芯1280 TOPS,计算效率82%——这个数字重要,行业普遍水平是20-30%,意味着同样的芯片面积,M100真正在干活的时间多得多。自动驾驶场景下,同等内存带宽,性能是英伟达Thor的3.8倍。
论文也入选了ISCA 2026,计算机体系结构领域最顶级的学术会议,理想是首家入选的车企。
当然,芯片是芯片,落地是落地。M100首发L9 Livis,实际智驾体验能不能兑现这些数字,还需要时间验证。但从架构选择来看,这次不是堆参数,是真的在底层做了不同的判断。
国产车规芯片能不能在架构层面走出自己的路,M100算是第一个认真给出答案的。