[RO]《Don't Fool Me Twice: Adapting to Adversity in the Wild with Experience-Driven Reasoning》N S Ravie, A Jong, K Jain, J Liu… [Indian Institute of Technology & CMU] (2026)
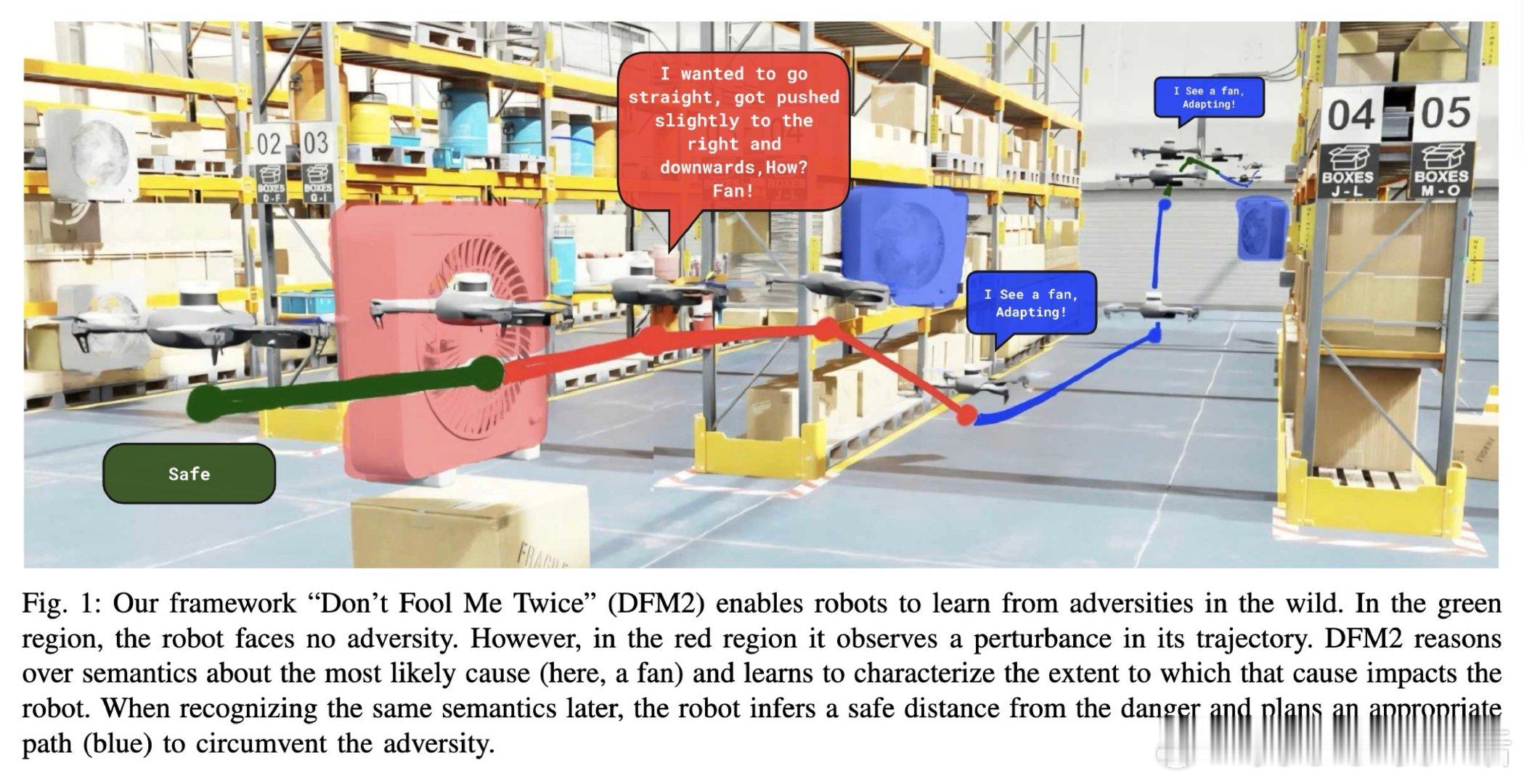
在开放环境机器人中,危险并非通用标签,而是与机体和导航栈绑定的失效模式。过去方法受困于VLM预判清单,本质原因是它不知道什么东西真的伤害过这台机器人。
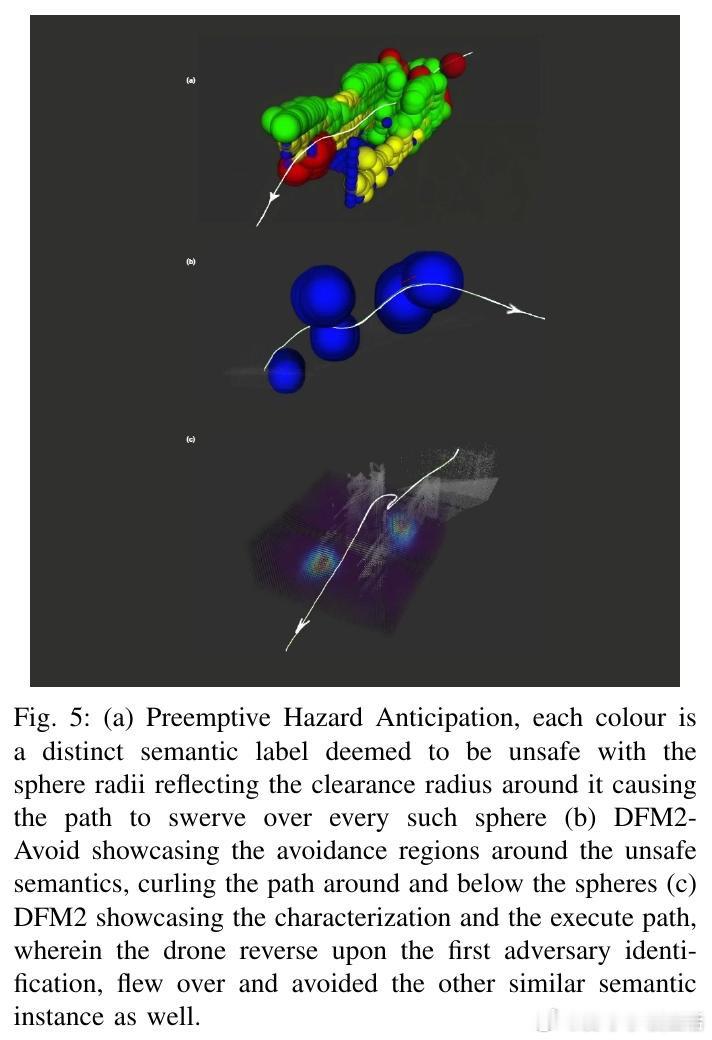
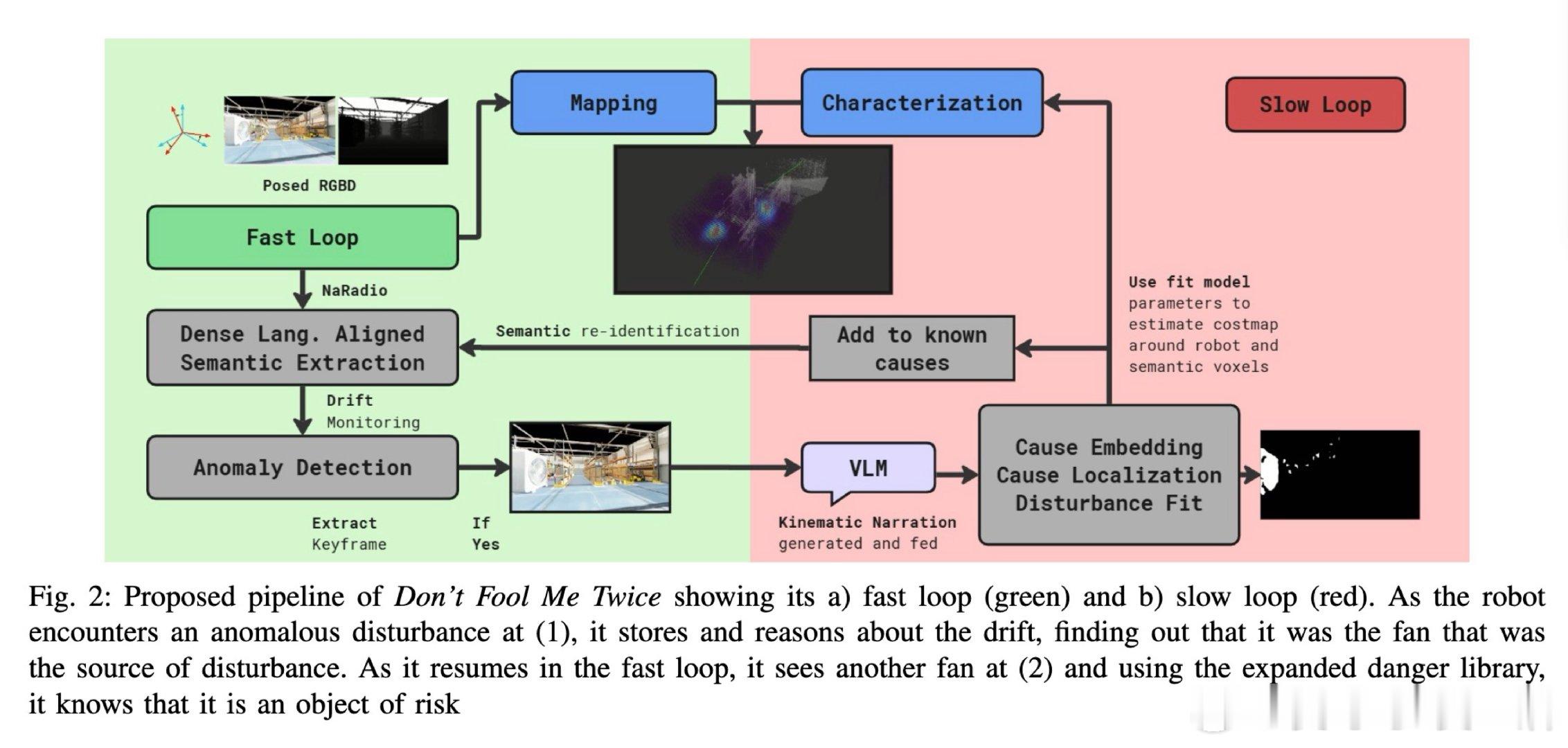
本文的核心洞见是:把异常轨迹重新看作可归因的经验信号。由此,事件触发叙事、语义定位、体素核回归这一操作,使机器人把一次受扰经历转成可复用的危险模型。
这项工作留下的遗产是让机器人从“看起来危险”转向“曾经伤害我”。它打开的新门是个体化危险记忆与不确定性规划,但尚未跨过的门槛是视觉不可见原因与多次因果验证。
arxiv.org/abs/2605.31119 机器学习 人工智能 论文 AI创造营